
Dynamic Response Analysis for Upper Structure of 5MW Offshore Wind Turbine System based on Multi-Body Dynamics Simulation
Recently renewable energy such as offshore wind energy takes a higher interest due to the depletion of fossil fuel and the environmental pollution. This paper deals with multi-body dynamics (MBD) analysis technique for offshore wind turbine system considering aerodynamic loads and Thevenin equation used for determination of electric generator torque. Dynamic responses of 5MW offshore wind turbine system are evaluated via the MBD analysis, and the system is the horizontal axis wind turbine (HAWT) which generates electricity from the three blades horizontally installed at upwind direction. The aerodynamic loads acting on the blades are computed by AeroDyn code, which is capable of accommodating a generalized dynamic wake using blade element momentum (BEM) theory. In order that the characteristics of dynamic loads and torques on the main joint parts of offshore wind turbine system are simulated similarly such an actual system, flexible body modeling including the actual structural properties are applied for both blade and tower in the multi-body dynamics model.
초록
최근 화석연료의 고갈과 환경오염으로 인하여 해상풍력에너지와 같은 신재생 에너지에 대한 관심이 높아지고 있다. 본 연구에서는 범용 동역학해석 프로그램인 MSC.ADAMS를 이용하여 공력하중 및 전기 발전기 토오크를 결정하기 위한 테브난(Thevenin) 방정식이 고려된 해상풍력발전기의 다물체 동역학 해석 기법을 검토하였다. 해석대상으로 고려한 시스템은 5MW급 해상풍력발전기이며, 3개의 블레이드가 수평축 방향에서 역풍을 받아 전기를 생산하는 수평축 풍력발전 형태이다. 블레이드에 작용하는 공력하중은 블레이드 요소 모멘텀 이론을 기반으로 일반화된 동적 웨이크를 고려할 수 있도록 개발된 AeroDyn 프로그램으로부터 산출하였다. 해상풍력발전기의 주요 연결부에서의 동적하중과 토오크 특성이 실제 현상과 유사하게 산출될 수 있도록 하기 위하여, 다물체 동역학 모델 상에 블레이드와 타워는 실제 구조 특성치를 고려한 유연체 모델링을 적용하였다.
Keywords:
Multi-body dynamics simulation, Offshore Wind Turbine System, Thevenin equation, Aerodynamic loads, 다물체 동역학 시뮬레이션, 해상풍력발전시스템, 테브난 방정식, 공력하중1. 서론
풍력발전시스템은 불규칙한 바람이 블레이드(blade)에 공력하중 형태로 작용하여 양력과 항력에 의한 회전이 발생하면 나셀(nacelle)을 통해 연결된 축(shaft)과 기어(gear)로 회전력이 발전기(generator)에 전달되어 전기를 생산한다. 이러한 풍력발전시스템의 작동과정에 서 바람의 세기와 풍향에 따라 전체 시스템의 작동과 중지를 위한 제어기가 고려되어야 하며, 풍력발전시스템이 자연의 외력을 에너지 형태로 변환함과 동시에 안정적으로 설치·유지되기 위해서는 다양한 공학적인 설계이론이 고려되어야 한다. 이와 관련된 유체역학, 전기, 제어, 구조역학, 피로역학, 진동·소음, 다물체 동역학 등의 공학이론을 적용한 많은 연구들이 수행되어 오고 있다(Sutherland and Mandell[2004], Maher et al.[2007], Zhao et al.[2007], Muyeen et al.[2008], Oerlemans and Schepers[2009], Kim and Kim[2011]). 이러한 공학이론 중에 다물체 동역학 해석은 풍력발전시스템의 동적작동특성 분석 및 구조, 피로, 진동·소음 등의 성능평가를 위한 설계하중데이터의 제공과 관련된 중요한 역할을 담당하기 때문에 풍력발전시스템 설계에 핵심적인 부분이라고 할 수 있다. 풍력발전시스템의 다물체 동역학 해석의 적절한 수행을 위해서는 블레이드 구조 표면 상에 유체역학적인 공력하중을 적용하여 동역학적 수치계산을 수행하는 다중물리현상을 고려해야 하며, 해상풍력발전시스템의 경우에는 고정식 혹은 부유식 형태의 지지구조에 발생하는 조류와 파도에 의한 동수력학 하중도 고려해야 한다(Jonkman[2009]). 유수의 신재생에너지 연구기관과 인증기관에서는 풍력발전시스템의 유용한 다물체 동역학 해석방법 개발을 위해서 많은 연구를 수행해 오고 있으며, 다양한 풍황 및 해상상태를 고려하여 실제적인동적 현상을 구현할 수 있는 수치해석기술에 대한 연구가 필요한분야이다(Passon and Kühn[2005]). 국내에서도 해상풍력발전에 적용될 수 있는 2MW급 이상의 풍력발전기에 대한 다물체동역학 해석에 대한 연구가 일부 수행되었으나, 강체(rigid body) 모델링을 기반으로 하였거나, 동력전달 및 발전시스템의 모델링이 실제 전기제어 로직을 구현할 수 있도록 정밀하게 적용되지는 못하였다(Jang and Sohn[2011], Park et al.[2012]).
본 논문에서는 다물체 동역학(Multi-Body Dynamics, MBD) 해석 기반해상풍력발전시스템의 동적거동 현상 구현의 기초 연구로서 범용 MBD 해석 프로그램인 MSC.ADAMS(MSC. Software[2005, 2010])를 이용하여 공력하중과 전기 발전기 토오크를 결정하기 위한 테브난(Thevenin) 방정식이 적용된 풍력발전시스템의 유연체(flexible body) 기반 다물체 동역학 시뮬레이션 해석 기법을 검토하였다. 해석의 범위는 고정식 및 부유식 해상풍력발전기에 동일하게 적용될 수 있는 상부구조 풍력발전시스템을 대상으로 하였다. 기존의 개발된 풍력발전시스템용 동특성 시뮬레이션 코드들의 기법과 특성을 검토하고, 풍력발전시스템의 MBD 해석 및 테브난 이론에 대해서 간략히 고찰하였다. 풍력발전시스템의 MBD 해석 수행을 위해 3개의 블레이드가 수평축 방향에서 역풍을 받아 전기를 생산하는 5MW급해상풍력발전기를 고려하였다. 풍력발전시스템의 블레이드에 작용하는 MBD 모델상의 공력하중은 블레이드 요소 모멘텀 이론을 기반으로 일반화된 동적 웨이크(dynamic wake)를 고려할 수 있도록 개발된 Aero Dyn(NREL [2002, 2005]) 프로그램으로부터 산출하였다. 산출된 공력하중은 보요소로 이상화된 유연체 블레이드(flexible blade)에 연동되어 풍력발전시스템의 동적 운동을 생성할 수 있도록 적용되었으며, 블레이드의 회전에 따른 전기 생산과 연관된 토오크 발생현상은 토오크-전압-속도(Torque-Voltage-Speed, TVS) 관계에 관한 테브난 방정식으로 고려하였다. MBD 해석으로부터 실제 5MW급해상풍력발전시스템의 동적 거동과 주요 연결부에서의 동적 하중이력특성을 검토하고, 블레이드와 타워를 강체구조로 고려했을 경우의 동적 하중이력특성을 유연체 모델의 결과와 비교 검토하였다.
2. 환경하중 및 동역학 시뮬레이션 코드
2.1 풍력발전시스템의 환경하중
풍력발전시스템의 동특성 해석 코드에 대한 공학적인 검토를 위해서는 먼저 풍력발전시스템에 작용하는 외력에 대한 이해가 필요하다. 풍력발전시스템은 설치 위치에 따라 바람, 지면, 파도, 조류 등의 환경적인 외력에 직접적인 영향을 받게 되며, 이러한 외력들은 독립적 혹은 복합적으로 작용할 수 있다. 부유식 해상풍력발전시스템을 기준으로 발생 가능한 환경하중의 상태는 Fig. 1에 나타나 있다.

Environmental loads on offshore wind turbine with floating type substructure (Robinson and Musial [2006]).
Fig. 1에 나타난 것처럼, 풍력발전시스템이 전기를 생산해내기 위해 필요한 바람은 제트기류, 난류바람, 후류 등의 공력형태로 작용한다. 풍력발전시스템이 육상에 설치되는 경우에는 지반의 역학적 거동이나 지진 등의 외력이 작용할 수 있다. 해상에 설치되는 풍력발전시스템은 좀 더 복잡한 환경적 외력들이 작용하게 되는데, 파도, 조류, 부력 등의 동수력학적 외력과 부유식 설치인 경우에 계류삭의 거동이 추가로 고려되어야 한다. 이외에도 낙뢰, 결빙, 부빙충돌 등의 하중도 풍력발전시스템에 작용할 수 있다. 풍력발전시스템은 풍력을 전기 생산을 위한 작동요인을 이용함과 동시에 목적에 부합할 수 있도록 다양한 환경적인 외력에 대해서 구조적으로 강건하게 설치·유지되어야 하기 때문에 풍력발전 시스템의 동적거동 시뮬레이션을 위해서는 전자기-열-구조-유체 등과 같은 여러 물리적인 복합 반응을 일괄적인 수치해석 방법으로 다루는 다중물리해석 방법 기반의 유체역학적인 외력해석과 기구 동역학적인 작동해석이 동시에 연성된 방법이 적용되어야 한다. 이러한 다중 물리기구 동역학 해석 방법으로 산출된 동적 거동과 동적 하중 결과는 구조, 내구, 진동·소음 평가를 위한 하중입력 데이터로 적용되게 된다. 환경적인 외력조건과 이에 부합할 수 있는 풍력발전시스템의 설계요구조건들은 국제전기기술위원회(IEC, International Electrotechnical Commission)와 유수의 선급에서 제정한 규정에 상세히 기술되어있다(GL[2003, 2005], IEC[2005, 2009]).
2.2 풍력발전시스템의 동역학 시뮬레이션 코드
풍력발전시스템의 동특성 시뮬레이션을 위한 해석접근 방법은 크게 MBD 해석, 유한 요소해석(finite element analysis, FEA), 모달해석법(modal analysis)으로 구분할 수 있으며, 현재까지 개발된 시뮬레이션 코드들은 3가지 방법 중에 하나를 적용하거나 혼용하는 형식을 적용하고 있다. 유수의 국책 연구소와 소프트웨어 회사는 2.1절에서 기술된 공탄성·유탄성 하중을 고려하여 GH Bladed, HAWC2, BHAWC, FAST, Flex5, ADAMS 등과 같은 풍력발전시스템의 동특성 해석을 수행할 수 있는 시뮬레이션 코드들을 개발해오고 있다(Passon[2007]). 해상풍력발전시스템의 시뮬레이션 코드 별로 다양한 해석접근 방법을 적용하고 있으며, 이중에 HAWC2, FAST, ADAMS는 MBD 해석 방법을 일부 혹은 전체적으로 사용하고 있다. HAWC2는 Risø National Laboratory (RNL)에서 개발되었으며, Timoshenko-beam의 FEA모델을 기반으로 MBD 알고리즘을 사용한다(RNL[2007]). FAST는 National Renewable Energy Laboratory (NREL)에서 개발되었으며, 제한적인 수치 자유도 내에서 블레이드와 타워의 저차 고유모드를 이용하는 모달법과 MBD 알고리즘을 혼용하여 사용하며 공력하중은 AeroDyn 코드를 사용한다(NREL[2005]). ADAMS는 MSC.Software의 MBD 해석 전용프로그램과 NREL에서 개발된 공력하중 코드인 AeroDyn을 적용하여 해석을 수행한다(MSC.Software[2005, 2010]). ADAMS를 이용한 MBD 해석방법 기반의 풍력발전시스템 시뮬레이션은 해석 자유도의 제한 없이 강체 모델이나 유연체 모델의 적용이 가능하며, 다양한 기구적 연결조건을 구성할 수 있기 때문에, 동적 회전거동과 비선형적 기구운동 현상의 구현이 가능하다. 본 논문에서는 NREL에서 개발된 AeroDyn 코드로부터 공력하중을 산출하여 MSC.ADAMS 기반으로 생성된 유연체 블레이드에 적용하고 블레이드의 회전에 따른 전기 생산과 연관된 토오크 발생현상은 TVS관계 이론인 테브난 방정식을 발전기 요소모델링 상에 고려하는 방법으로 5MW급 풍력발전시스템의 MBD 해석을 수행한다.
3. 풍력발전시스템 MBD 해석 이론
3.1 다물체 동역학 운동방정식
풍력발전기와과 같은 동적 시스템에 대한 기본적인 다물체 동역학 운동방정식은 다음과 같이 정의할 수 있다(Shabana[2005]).
여기서 q는 일반화된 좌표 벡터,
 및
및
 는 각각 일반화된 속도 및 가속도 벡터이다. M, k, K, D는 각각 블레이드, 너셀 조립체, 타워를 구성하는 질량 및 질량관성 행렬, 코리올리(Coriolis) 및 회전운동 힘벡터, 구조강성행렬, 감쇠계수행렬이다. 강체모델에서는 구조강성행렬 및 감쇠계수행렬을 0으로 정의한다. F는 블레이드에 작용하는 공력하중인 정상풍속 및 돌풍에 관한 외력 벡터이다. C는 블레이드, 너셀, 타워 등의 풍력발전기 주요 구성품을 연결하기 위한 연결 조인트(joint)의 운동 구속(kinematic constraint) 및 구속력이다. λ는 라그랑지 승수(Lagrange multiplier) 벡터로서 구속력을 산출하기 위해 적용된다. 라그랑지 승수로 정의되는 미지 변수인 조인트 구속력을 운동방정식으로부터 산출하기 위하여 다음과 같은 추가적인 조인트 구속방적식이 적용된다.
는 각각 일반화된 속도 및 가속도 벡터이다. M, k, K, D는 각각 블레이드, 너셀 조립체, 타워를 구성하는 질량 및 질량관성 행렬, 코리올리(Coriolis) 및 회전운동 힘벡터, 구조강성행렬, 감쇠계수행렬이다. 강체모델에서는 구조강성행렬 및 감쇠계수행렬을 0으로 정의한다. F는 블레이드에 작용하는 공력하중인 정상풍속 및 돌풍에 관한 외력 벡터이다. C는 블레이드, 너셀, 타워 등의 풍력발전기 주요 구성품을 연결하기 위한 연결 조인트(joint)의 운동 구속(kinematic constraint) 및 구속력이다. λ는 라그랑지 승수(Lagrange multiplier) 벡터로서 구속력을 산출하기 위해 적용된다. 라그랑지 승수로 정의되는 미지 변수인 조인트 구속력을 운동방정식으로부터 산출하기 위하여 다음과 같은 추가적인 조인트 구속방적식이 적용된다.

식 (1)과 (2)는 다음과 같이 확장 정식화에 의해 정리될 수 있다.
식 (3)으로부터 다물체 동역학 모델의 가속도와 조인트 구속력이 산출된다.
3.2 테브난 방정식
테브난 방정식은 발전기와 같은 전기 생산을 위한 기계시스템의 토오크-전압-속도 산출이나 등가전력 회로설계를 위해 많이 적용된다. 본 연구에서는 5MW급 해상풍력발전기가 풍속에 의해 블레이드의 회전력이 발전기의 전압, 저항 및 슬립에 따라 적정한 토오크로 산출되도록 다물체동역학 모델을 구성하기 위해 테브난 방정식을 적용하였다. 일반적인 동기식 발전기의 발전 토오크 산출을 위한 테브난 방정식은 다음과 같이 정의 된다(Dorf and Svoboda[2010], MSC.Software[2005]).
여기서 q1은 위상의 수, V1a는 등가전원전압(equivalent source voltage), R2는 회전자 저항(rotor resistance), S는 슬립비, ωs는 동기속도(synchronous speed), Re1는 테브난 등가 고정자 저항(Thevenin’sequivalent stator resistance), R2는 회전자 저항(rotor resistance), Xe1는 테브난 등가 고정자 누설 유도저항(Thevenin’s equivalent stator leakage reactance), 그리고 X2는 회전자 누설 유도저항(rotor leakagereactance) 이다. 식 (4)는 슬립비, 속도 및 관계계수의 형태로 다음과 같이 발전기의 토오크를 산출하는데 유용한 형태의 식으로 정리될 수 있다.
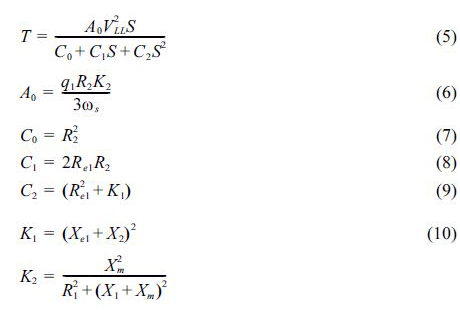
여기서 VLL은 선간전압(line-to-line voltage), R1은 고정자 저항, X1은 고정자 누설 유도저항, 그리고 Xm은 자화 유도저항(magnetizing reactance) 이다. 테브난 방정식으로 발전 전기 토오크는 식 (1)로부터 계산되는 회전운동량과 연계되어 산출된다.
4. 풍력발전시스템 MBD 해석
4.1 다물체 동역학 모델링
본 논문에서 고려한 풍력발전시스템은 3개의 블레이드가 수평축방향에서 역풍을 받아 반시계 방향으로 회전하여 해상에서 대용량으로 전기를 생산할 수 있는 5MW급 수평축 풍력발전 형태이다. MBD 모델링은 MSC.ADAMS를 기반으로 수행하였으며, 풍력발전시스템의 개략적인 형태 및 주요사양은 는 Fig. 2와 Table 1에 나타나 있다.
상부에서는 블레이드와 너셀구조를 지지하고 해상풍력발전시스템의 경우에 하부에서는 연결구조(transition piece)를 통해 하부구조(substructure)와 연결되는 타워의 모델링은 전체 길이를 일정 간격으로 분할한 요소로 정의된 유연체 보(flexible beam)로 모델링 되었다. 타워의 상단과 하단 부분은 고정 조인트(Fixed joint)로 구성하였다. 유연체 타워 모델링을 위해 사용된 질량, 관성모멘트, 강성 등의 물성데이터 정보는 기존의 연구문헌(Jonkman[2007])을 참조하여 적용하였으며, 타워의 높이에 따라 Fig. 3에 도식적으로 나타나 있다.
Fig. 3에 나타난 바와 같이, 타워의 구조는 일반적으로 원추형태로 설계되어지기 때문에 하단부에 대비해서 상단부쪽의 기계적 물성치가 감소하는 형태를 나타낸다.
너셀은 타워의 상단에서 고정 조인트로 연결되며, 내부에는 샤프트와 발전기가 너셀 중심축을 기준으로 장착되고, 전면으로 블레이드를 장착할 수 있는 허브(hub)가 연결된다. 너셀과 연결부품들의 모델링 형상은 Fig. 4에 나타나 있다.

General outline of wind turbine MBD model.

Principle specifications of wind turbine
Fig. 4에 나타난 부품요소들에 대해서 중량과 관성모멘트의 기계적 특성치들을 고려함과 동시에 기어의 거동은 블레이드의 회전속도와 전기 발전 토오크 연관되도록 선간입력에 대해서 스텝함수(step function)를 적용하였다. 발전기는 샤프트의 연결부에 TVS 관계에 대해서 식 (5)를 이용한 토오크 함수로 적용하여 블레이드의 회전속도가 일정 회전수(rotation pre minute, rpm)에 도달할 때 전기가 생성될 수 있도록 고려하였다. 토오크 함수에 적용되는 계수인 식 (6)~(9)의 입력 값은 기존의 연구문헌(Jonkman[2007])의 5MW풍력발전기용 동력전달시스템 및 제어시스템 특성치 중에 최대출력계수, 정격발전 토오크, 발전기-토오크 상수, 최대 발전 토오크비 등의 수치를 참조하여 산출하였고, 수치해석을 수행하면서 정격회전속도가 균일하게 산출되도록 보정하였다.

Mechanical properties of tower structure.

MBD modeling for nacelle, hub and power-train.

Mechanical and geometric properties of blade structure.

Coordinate axes on blade section for aerodynamic loading.

General multi-body dynamics model for 5MW horizontalaxis wind turbine.
블레이드의 모델링은 전체 길이를 일정한 간격의 요소로 분할하고 필드요소를 이용하여 유연체 보로 모델링 하였다. 블레이드의 피치각도는 입력 파라미터의 형태로 변경가능하며, 본 논문에서는 정격풍속상태를 고려하기 위하여 0도의 피치각도를 적용하여 허브장착부에 고정 조인트로 연결하였다. 블레이드에 사용된 유연체 보의 질량, 관성모멘트, 강성 등의 물성데이터와 코드길이, 구조 및 공기역학적 각도의 형상데이터는 기존의 연구문헌(Jonkman[2007])을 참조하여 적용하였으며, 블레이드 반경 관해서 Fig. 5에 도식적으로 나타내었다. 블레이드의 각 분할요소 도심에는 공력해석 코드인 AeroDyn으로부터 계산된 공력하중을 연동하기 위하여 범용하중(general force) 요소를 추가하였고, 익형 데이터(airfoil data)는 NACA64_A17을 사용하였다. 범용하중요소는 MSC. ADAMS를 이용한 다물체동역학 모델 상에서 외부의 하중데이터를 연동하기 위해 적용되는 하중 모델링 요소이다. MBD 모델의 보 요소 상의 범용하중요소와 공력하중 데이터의 연성해석을 위해서, AeroDyn 기준으로 블레이드 상의 공력좌표계와 범용하중요소 좌표계는 Fig. 6에 나타난 바와 같이 일치되도록 구성하였다. 블레이드의 각 분할요소에 적용된 공력데이터는 해석이 수행되면 블레이드의 길이방향으로 선형 보간되어 전체 블레이드면에 풍력이 작용되도록 하였다.
각 파트에 대한 기구학적 모델링이 완료된 후 조합하면 Fig. 7~8과 같이 동역학 시뮬레이션을 수행할 수 있는 풍력발전시스템 MBD모델이 구성된다. Fig. 7은 전체 풍력발전시스템의 MBD 모델의 형상을 나타내며, Fig. 8은 블레이드 허브를 중심으로 너셀부의 상세모델링 형상을 나타낸다.

Detailed multi-body dynamics model in way of nacelle.
Fig. 8의 블레이드 파트 상의 각 분할 단면에는 공력하중을 연동하기 위한 범용하중요소의 적용형상을 확인할 수 있다.
4.2 MBD 해석 결과
본 절에서는 앞서의4.1절에서 생성된 5MW급 해상 풍력발전기의 MBD 모델을 이용하여 풍력발전기의 동적 거동과 주요 연결부에서의 동적하중이력 특성을 검토하고, 블레이드와 타워를 강체구조로 고려했을 경우의 동적하중이력 특성을 비교검토 하였다. 풍력발전기의 동작조건은 허브높이에서의 정격풍속 11.4m/sec, 풍향각도 0도, 공기밀도 1.225kg/m3, 수직풍 전단비 0.14의 정상풍(steady wind) 조건으로 고려하였다. 해석을 위한 시간간격은 0.02479초이며, 100초 동안 해석을 수행하였다. 정격 풍속 상태에서 5MW 풍력발전시스템이 정상 적으로 전기를 생산해 내기 위한 작동상태를 검토하기 위하여 Fig. 9에 나타난 것처럼 발전기 회전자의 정격 회전속도를 발전기 파트 상에 측정 마커(marker)를 생성하여 산출하였다.
Fig. 9의 결과에서 나타난 바와 같이 풍력발전기의 블레이드가 피치각 0도에서 정격풍속을 받아 회전을 시작하여 11.4 초에 도달하면 정격 발전기 회전자의 속도가 12.1rpm으로 일정하게 발생하는 형태로 발전기가 작동을 함을 알 수 있다. 정격풍속 11.4m/sec에서 발전기 회전자의 정격 회전속도 12.1rpm은 일반적인 5MW급 풍력발전기의 사양으로 알려져 있으며(Jonkman[2009]), 본 연구에서의 MBD 모델의 동적거동 시뮬레이션의 정확도를 Fig. 9의 결과를 통해 확인할 수 있다.
주요 연결부의 동적 하중과 토오크 이력은 블레이드와 허브의 연결부(pitch bearing mount, PBM), 너셀과 타워의 연결부(yaw bearing mount, YBM), 그리고 타워하단 고정부(tower base, TB)에서 각각 결과를 산출하였으며, Fig. 10~Fig. 15에 나타나 있다. 모든 결과 그림들 상의 하중과 토오크의 방향은 Fig. 7에 나타나 있는 좌표계 방향과 일치되도록 산출하였다.

Result of rated generator rotor speed at wind speed 11.4 m/s.

Force results of pitch bearing mount.

Torque results of pitch bearing mount.
Fig. 10과 11에 나타난 바와 같이, PBM에서의 동적 하중과 토오크 이력은 정격풍속 상태에서 블레이드의 회전으로 인해서 블레이드의 회전방향과 중력방향인 X, Y축 방향을 기준으로 크게 나타낸다.
Fig. 12~13에 나타난 것처럼, YBM에서의 동적 하중과 토오크 이력은 각각 중력방향인 Y축 방향과 RX축 방향에서 가장 크게 나타났다. YBM의 동적하중과 토오크는 전체적으로 PBM보다 크게나타난다.

Force results of yaw bearing mount.

Torque results of yaw bearing mount.

Force results of tower base.

Torque results of tower base.

Torque result comparison of pitch bearing mount.

Torque result comparison of yaw bearing mount.
Fig. 14~15에 나타난 바와 같이, TB에서의 동적 하중과 토오크이력은 YBM에서의 경향과 유사하게 각각 중력방향인 Y축 방향과RX축 방향에서 가장 크게 나타났다. TB의 동적하중과 토오크는 전체적으로 PBM 및 YBM 대비 가장 크게 나타난다.
블레이드와 타워를 강체구조로 고려했을 경우의 특성을 비교검토하기 위하여 블레이드와 타워를 강체모델로 교체하고, 유연체 모델과 동일한 동작조건에 대해서 해석을 수행하였다. Fig. 16~18에대표적으로 RX축 방향에서 주요 연결부의 동적 토오크 이력을 비교하여 나타내었다.
Fig. 16~18에 나타난 바와 같이, PBM에서는 초기 작동상태 구간을 제외하면 모델간의 해석결과 차이가 거의 없고, YBM에서는 유연체 모델의 토오크 진폭이 좀 더 크게 나타났으며, TB 구간에서는 유연체 모델과 강체모델의 진폭 차이가 가장 두드러지게 나타났다. 모델 간의 토오크 응답특성을 정량적으로 비교하기 위하여 Table 2와 같이 실효값(root mean square, RMS) 정리하였다.
Table 2에 나타난 바와 같이, PBM과 YBM에서는 강체모델의 토오크 결과가 크게 나타나는 반면에 TB에서는 유연체모델의 토오크 결과가 더 크게 나타난다. 동적 토오크의 특성 분석은 풍력발전기와 같은 회전체 시스템의 구조설계나 진동분석에 있어 중요한 요소이기 때문에 동역학 시뮬레이션 상에서 정확한 분석을 수행하는 것이 중요하다고 할 수 있다. 구조특성치를 반영하는 유연체모델의 결과가 실제 현상을 반영한 유연체 모델의 결과가 더 타당하다고 판단되나, 해석의 편의성 측면에서 강체모델의 적용은 모형시험이나 실측결과와의 비교를 통해서 좀 더 면밀한 검토가 필요하다고 판단된다.

Torque result comparison of tower base.
Torque result comparison based on RMS [unit: N-m]
5. 결론
본 연구에서는 풍력발전시스템의 동특성을 해석할 수 있도록 개발된 여러 코드들의 기법과 특징을 살펴보았고, 다물체 동역학 전용 코드인 MSC.ADAMS와 NREL에서 개발된 공력해석 코드인 AeroDyn을 연동하여 5MW급 풍력발전시스템의 동역학 해석을 수행하였다. 실제 풍력발전기의 거동과 유사한 모사를 위해서 블레이드와 타워를 유연체 모델로 고려하였으며, 블레이드의 회전에 따른 전기 생산과 토오크 발생현상을 구현하기 위하여 테브난 방정식을 적용하였다. MBD해석을 통해 PBM, YBM 및 TB와 같은 주요 연결부에서의 동적하중이력 산출결과를 비교 검토하였으며, TB의 동적하중과 토오크는 전체적으로 PBM 및 YBM 대비 가장 크게 나타남을 확인하였다. 블레이드와 타워를 강체구조로 고려했을 경우의 동적 토오크 특성을 대표적으로 RX축 방향에서 유연체 모델의 결과와 비교검토를 수행하여 TB 구간에서 유연체 모델과 강체모델의 진폭 차이가 가장 현저함을 확인하였다. 본 연구에서 수행된 MBD 해석 기법을 통해 풍력발전기의 동적거동 분석과 주요 연결부의 동적하중이력 결과를 이용한 구조설계, 피로, 소음, 진동 분석을 위한 하중조건으로 유용하게 사용될 수 있을 것으로 기대 된다. 저자들은 추후 부유식 하부구조물의 동수력학적 하중 및 계류하중의 연동과 블레이드 작동 안정성을 위한 제어 알고리즘 연동에 대한 연구들을 수행할 예정이다.
Acknowledgments
본 연구는 2013년도 정부(미래창조과학부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구사업(2012R1A1A1002897)이며, 해양수산부의 해양청정에너지개발사업 “10MW급 부유식 파력-해상풍력 연계형 발전시스템 개발 및 인프라 구축”의 지원으로 수행되었으며, 연구비 지원에 감사드립니다.
References
-
H.J Sutherland, J.F Mandell, “Effect of mean stress on the damage of wind turbine blades”, Journal of Solar Energy Engineering, (2004), 126(1041), p1049.
[https://doi.org/10.1115/1.1785160]

-
A Maher, S Noroozi, J Vinney, “Combined analytical/ FEA-based coupled aero structure simulation of a wind turbine with bend-twist adaptive blades”, Renewable Energy, (2007), 32, p916-930.
[https://doi.org/10.1016/j.renene.2006.04.007]
-
X Zhao, P Maiâer, J Wu, “A new multibody modelling methodology for wind turbine structures using a cardanic joint beam element”, Renewable Energy, (2007), 32, p532-546.
[https://doi.org/10.1016/j.renene.2006.04.010]
- S.M Muyeen, M.H Ali, R Takahashi, T Murata, J Tamura, “Damping of blade-shaft torsional oscillations of wind turbine generator system”, Electric Power Components and Systems, (2008), 36, p195-211.
-
S Oerlemans, J.G Schepers, “Prediction of wind turbine noise and validation against experiment”, Aeroacoustics, (2009), 8, p555-584.
[https://doi.org/10.1260/147547209789141489]
-
J Kim, W Kim, “Viscous flow analysis around a wind turbine blade with end plate and rake”, Journal of the Korean Society for Marine Environmental Engineering, (2011), 14, p273-279.
[https://doi.org/10.1002/we.347]
-
J Jonkman, “Dynamics of offshore floating wind turbines - model development and verification”, Wind Energy, (2009), 12, p459-492.
[https://doi.org/10.1002/we.347]
- P Passon, M Kühn, “State-of-the-art and development needs of simulation codes for offshore wind turbines”, Copenhagen Offshore Wind 2005 Conference and Expedition Proceedings, Copenhagen, Denmark, (2005).
- MSC. Software, “ADAMS/WT User’s Guide - Ver. 2.0”, USA, (2005).
- MSC. Software, “MSC.ADAMS User’s Manual - Ver.2010”, USA, (2010).
- NREL, “AeroDyn User’s Guide - Ver. 12.5”, USA, (2002).
- NREL, “AeroDyn Theory Manual”, USA, (2005).
- M Robinson, W Musial, “Offshore Wind Technology Overview”, NREL Report, NREL/PR-500-40462, (2006).
- GL, “Guideline for the Certification of Wind Turbines”, Germany, (2003).
- GL, “Guideline for the Certification of Offshore Wind Turbines”, Germany, (2005).
- IEC,, “IEC 61400-1: Design Requirements for Wind Turbines - Third Edition”, Switzerland, (2005).
- IEC, “IEC 61400-3: Design Requirements for Offshore Wind Turbines - Edition 1.0”, Switzerland, (2009).
-
P Passon, M Kühn, S Butterfield, J Jonkman, T Camp, T. J Larsen, “OC3 - Benchmark exercise of aero-elastic offshore wind turbine codes”, Journal of Physics: Conference Series, (2007), 75, p1-12.
[https://doi.org/10.1088/1742-6596/75/1/012071]
- S.J Jang, J.H Sohn, “Analysis of dynamic behavior of floating offshore wind turbine system”, Trans. Korean Soc. Mech. Eng. A, (2011), 35, p77-83.
-
K Park, J Cha, N Ku, A Jo, K Lee, “Structural analysis of floating offshore wind turbine tower based on flexible multibody dynamics”, Trans. Korean Soc. Mech. Eng. A, (2012), 36, p1489-1495.
[https://doi.org/10.3795/KSME-A.2012.36.12.1489]
- Risø National Laboratory, “HAWC2 User’s Manual - Ver. 3.1”, Demark, (2007).
- NREL, “FAST User’s Guide - Ver. 6.0”, USA, (2005).
- A.A Shabana, “Dynamics of Multibody Systems, Third edition”, Cambridge University Press, (2005).
- R.C Dorf, J.A Svoboda, “Introduction to Electric Circuits (8th ed.)”, John Wiley & Sons, (2010).
- J.M Jonkman, “Dynamics modeling and loads analysis of an offshore floating wind turbine”, NREL Technical Report, NREL/TP-500-41958, (2007).